Last week, we were talking about the whole concept behind frames, their necessity in physics, and about relativity, you know, the relative motion of bodies to an observer. This week, I decided to put a bit more of emphasis on the mathematics behind it. In high school you likely have already seen it, and if you haven't, well it does not really involve complex mathematics, so you can definitely understand it. This one personally excites more than the other posts because it has maths. But essentially it is just a mathematical summary of the ideas discussed on the last post.
Here is some considerations before we start:
We will be mostly dealing with frames moving at constant velocity or not moving, or what we call inertial frames, and they would be observational frames of reference, which implies the observer would be at the origin in its own frame, at rest (its velocity is zero in its frame).
For simplicity, we will consider 2 bodies (you could think of them as being points with no dimension), in a 2-dimensional space. And our notation would be (x,y) for the spatial coordinates and t for temporal dimensions.
 In this first case, we will consider body A's frame. For convention, this referential is considered as frame S, and for the sake of simplicity, we will consider B as moving in a constant velocity v in the x direction. Now let's make some analysis of what is shown in the picture above. (A hint: A lot of problems in physics requires you to use a bit of intuition, it will make problem-solving easier... Until you reach quantum mechanics, because then, you can throw intuition out of the window). B's initial position is r1 = (x1,y1), and its final position is r2 = (x2,y2), again emphasizing this is relative to A, and how can we get from point (x1,y1) to point (x2,y2)? At this point, it will be good if you know about uniform rectilinear motion where displacement x_final = x_initial + vt (for one dimension). In fact this first part is just your classical physics problem, and since you know about v, you can easily write: r2 = r1 + vt, but remember both r1 and r2 have two components (since we are talking about two dimensional space) so how do the individual coordinates change from r1 to r2?
In this first case, we will consider body A's frame. For convention, this referential is considered as frame S, and for the sake of simplicity, we will consider B as moving in a constant velocity v in the x direction. Now let's make some analysis of what is shown in the picture above. (A hint: A lot of problems in physics requires you to use a bit of intuition, it will make problem-solving easier... Until you reach quantum mechanics, because then, you can throw intuition out of the window). B's initial position is r1 = (x1,y1), and its final position is r2 = (x2,y2), again emphasizing this is relative to A, and how can we get from point (x1,y1) to point (x2,y2)? At this point, it will be good if you know about uniform rectilinear motion where displacement x_final = x_initial + vt (for one dimension). In fact this first part is just your classical physics problem, and since you know about v, you can easily write: r2 = r1 + vt, but remember both r1 and r2 have two components (since we are talking about two dimensional space) so how do the individual coordinates change from r1 to r2?
Let's see the image once again. If you have noticed, it seems that while B is moving, it remains at the same relative height (i.e. y doesn't change), while x changes from a point x1 to another point x2. So we can simplify r1 = r2 + vt as:
{x2=x1+vty2=y1
As you can see we can describe the movement of B completely with the expression above, and for any t = t', we can predict the position of B relative to A.
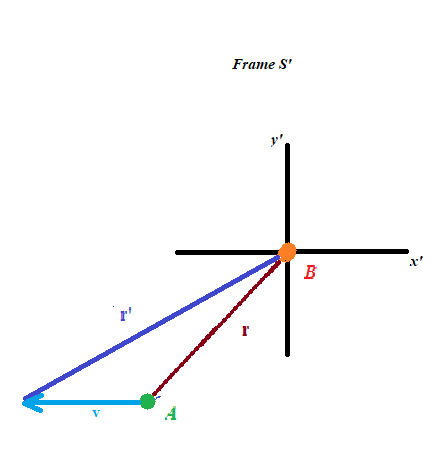
Now let's switch the positions. Now B will be the observer and you will see something interesting happening. Remember, the distance between them must be conserved when we switch from A's frame S to B's frame S':
 So in this frame, B is not the one moving, and as such we know have A moving in a constant velocity v. One thing to note here though is that we also can describe A's motion relative to B in same way we did before, with the only difference being that for B, A is moving to its left, which in this convention implies the coordinates change negatively. So r'2 = r'1 - vt and it terms of its coordinates:
So in this frame, B is not the one moving, and as such we know have A moving in a constant velocity v. One thing to note here though is that we also can describe A's motion relative to B in same way we did before, with the only difference being that for B, A is moving to its left, which in this convention implies the coordinates change negatively. So r'2 = r'1 - vt and it terms of its coordinates:
{x′2=x′1−vty′2=y′1
So what can we take out from all of this? First, we should realize something:
r2−r1=r′1−r′2=vt⇔r′2+r2=r′1+r1⇔{r′=r+vtr=r′−vt
Now that last part would show us a relation between the different frames, as it shows us that we could switch between S and S', and still be able to predict the motion of bodies. Even better, it shows us that if we know the movement of a body in one frame, we can easily switch to another frame and still be able to predict the results. Now a couple things you should know. This is only valid because we assume time to be the same in both frames (is what we call in physics an invariant, something that remains the same when we change frames of reference), and is in fact, referred in classical literature as Galilean Invariance, which states:
A - Time is invariant to any frame transformation in inertial frames
B - Newton's laws of motion are invariant to any frame transformation in inertial frames. (This part was added later, since Newton was born in the year Galileo died (Talk about eerie coincidences, in the same year a genius died, another was born).
In Special Relativity, we will see that is not actually true, but Galilean Relativity is still widely used in many applications of physics, like various engineerings (Since for all purposes, Galilean Relativity is really accurate for cases when we are not moving at velocities close to c).
By the way, the relations we see above allows us to switch between various referentials, in a certain way transforming the frames (or better saying, transforming the coordinates), which is why we usually refer to them as Galilean transformations. If we were considering 3-dimensional space, but with v still only in the x direction, we would have something like this:
⎧⎩⎨⎪⎪⎪⎪x′=x+vty′=yz′=zt′=t⇔⎧⎩⎨⎪⎪⎪⎪x=x′−vty=y′z=z′t=t′
And if you already know about matrices, since we are talking about vectors after all, there is a neat way to write this in a general way, like:
⎛⎝⎜⎜⎜x′y′z′t′⎞⎠⎟⎟⎟=⎡⎣⎢⎢⎢⎢100001000010vxvyvz1⎤⎦⎥⎥⎥⎥∗⎛⎝⎜⎜⎜xyzt⎞⎠⎟⎟⎟
This is general because we are considering that velocity is not only in one direction, but if you set v_y and v_z to zero you get the expression above.
And if you don't know about matrices don't worry about it, but I recommend you watch a series of videos in the youtube channel 3blue1brown, he has a playlist where he gives a good intuition on linear algebra and you can learn more about matrices and vectors and how you can use them for things like describing transformations between frames (or vector spaces in linear algebra, which is a bit more general). After you have a better intuition of vectors, you will see why in physics, sometimes it is better to write things like this, instead of using the usual way. And it will specially useful in Special Relativity.
Some references:
Physics for Scientists and Engineers, by Serway & Jewett, 9th Edition , Part I: Mechanics, Chapters 3 (if you want to know a bit about vectors in physics) and 4 (if you want to know about motion in 2D, and they also tackle this part about relative motion). They have some exercises you can solve as well to give you a better intuition of Galilean Relativity. I also advise you to look for exercises online, both on vectors and in relative motion, and I will put some links below for you to check out.
(this is not an usual way to quote scientifically, but for a layperson, this is easier to understand, so I will quote it this way)
In this site, you find exercises with solutions to various physical problems, and I recommend you check this sections in specific if you need to look at these sections:
- https://physics.info/frames/
- https://physics.info/vector-addition/
- https://physics.info/vector-components/
- https://physics.info/vector-multiplication/
- https://physics.info/vector-multiplication/
- http://www.problemsphysics.com/vectors.html
- http://www.physicstutorials.org/home/exams/vectors-exams-and-solutions/150-vectors-exam1-and-solutions
Now I believe this will be enough for you to practice a bit. One thing I've learned from all the teachers and professors I've had, is that the best way for you to get a concept, is for you to try it yourself, so I will try to motivate you to constantly do exercises if possible.
{x′2=x′1−vty′2=y
{
Here is some considerations before we start:
We will be mostly dealing with frames moving at constant velocity or not moving, or what we call inertial frames, and they would be observational frames of reference, which implies the observer would be at the origin in its own frame, at rest (its velocity is zero in its frame).
For simplicity, we will consider 2 bodies (you could think of them as being points with no dimension), in a 2-dimensional space. And our notation would be (x,y) for the spatial coordinates and t for temporal dimensions.

Let's see the image once again. If you have noticed, it seems that while B is moving, it remains at the same relative height (i.e. y doesn't change), while x changes from a point x1 to another point x2. So we can simplify r1 = r2 + vt as:
{x2=x1+vty2=y1
As you can see we can describe the movement of B completely with the expression above, and for any t = t', we can predict the position of B relative to A.
Now let's switch the positions. Now B will be the observer and you will see something interesting happening. Remember, the distance between them must be conserved when we switch from A's frame S to B's frame S':
{x′2=x′1−vty′2=y′1
So what can we take out from all of this? First, we should realize something:
r2−r1=r′1−r′2=vt⇔r′2+r2=r′1+r1⇔{r′=r+vtr=r′−vt
Now that last part would show us a relation between the different frames, as it shows us that we could switch between S and S', and still be able to predict the motion of bodies. Even better, it shows us that if we know the movement of a body in one frame, we can easily switch to another frame and still be able to predict the results. Now a couple things you should know. This is only valid because we assume time to be the same in both frames (is what we call in physics an invariant, something that remains the same when we change frames of reference), and is in fact, referred in classical literature as Galilean Invariance, which states:
A - Time is invariant to any frame transformation in inertial frames
B - Newton's laws of motion are invariant to any frame transformation in inertial frames. (This part was added later, since Newton was born in the year Galileo died (Talk about eerie coincidences, in the same year a genius died, another was born).
In Special Relativity, we will see that is not actually true, but Galilean Relativity is still widely used in many applications of physics, like various engineerings (Since for all purposes, Galilean Relativity is really accurate for cases when we are not moving at velocities close to c).
By the way, the relations we see above allows us to switch between various referentials, in a certain way transforming the frames (or better saying, transforming the coordinates), which is why we usually refer to them as Galilean transformations. If we were considering 3-dimensional space, but with v still only in the x direction, we would have something like this:
⎧⎩⎨⎪⎪⎪⎪x′=x+vty′=yz′=zt′=t⇔⎧⎩⎨⎪⎪⎪⎪x=x′−vty=y′z=z′t=t′
And if you already know about matrices, since we are talking about vectors after all, there is a neat way to write this in a general way, like:
⎛⎝⎜⎜⎜x′y′z′t′⎞⎠⎟⎟⎟=⎡⎣⎢⎢⎢⎢100001000010vxvyvz1⎤⎦⎥⎥⎥⎥∗⎛⎝⎜⎜⎜xyzt⎞⎠⎟⎟⎟
This is general because we are considering that velocity is not only in one direction, but if you set v_y and v_z to zero you get the expression above.
And if you don't know about matrices don't worry about it, but I recommend you watch a series of videos in the youtube channel 3blue1brown, he has a playlist where he gives a good intuition on linear algebra and you can learn more about matrices and vectors and how you can use them for things like describing transformations between frames (or vector spaces in linear algebra, which is a bit more general). After you have a better intuition of vectors, you will see why in physics, sometimes it is better to write things like this, instead of using the usual way. And it will specially useful in Special Relativity.
Some references:
Physics for Scientists and Engineers, by Serway & Jewett, 9th Edition , Part I: Mechanics, Chapters 3 (if you want to know a bit about vectors in physics) and 4 (if you want to know about motion in 2D, and they also tackle this part about relative motion). They have some exercises you can solve as well to give you a better intuition of Galilean Relativity. I also advise you to look for exercises online, both on vectors and in relative motion, and I will put some links below for you to check out.
(this is not an usual way to quote scientifically, but for a layperson, this is easier to understand, so I will quote it this way)
In this site, you find exercises with solutions to various physical problems, and I recommend you check this sections in specific if you need to look at these sections:
- https://physics.info/frames/
- https://physics.info/vector-addition/
- https://physics.info/vector-components/
- https://physics.info/vector-multiplication/
- https://physics.info/vector-multiplication/
- http://www.problemsphysics.com/vectors.html
- http://www.physicstutorials.org/home/exams/vectors-exams-and-solutions/150-vectors-exam1-and-solutions
Now I believe this will be enough for you to practice a bit. One thing I've learned from all the teachers and professors I've had, is that the best way for you to get a concept, is for you to try it yourself, so I will try to motivate you to constantly do exercises if possible.
{x′2=x′1−vty′2=y
{
No comments:
Post a Comment